

Spreading
Precision fertilisation
Crop yield is heavily dependant on the way fertiliser is spread. Any minor deviation can result in yield losses. In addition, it is important for the environment to handle fertilisers accurately. With legislation becoming stricter, it is important to spread as efficiently as possible. An important factor here is the use of precision fertilisation. The added value of precision fertilisation is that the spreading rate and working width can be controlled. Fertiliser application can also be site-specific, as a result of which it is possible to use fertilisers more efficiently. This brings with it a lot of benefits. For example, crop quality is increased, yields are improved and there is a positive impact on disease and weed pressure.
Precision farming involves the use of sophisticated equipment and information technology. The desired precision may vary from farm to farm, as the options available within a farm and the crops it grows have to be considered first. This is because the level of precision on a large farm with extensive crops is different from the level on a small farm with intensive crops.
GPS (Global Positioning System)
Precision fertilisation can already be easily applied using GPS,
where different levels of accuracy are possible. A correction signal is needed when GPS is used for agricultural purposes.
| Overview of accuracy of GPS systems with and without correction signal | |
| GPS with correction signal | Accuracy |
| GPS without correction | 500 to 1500 cm (not suitable for agricultural application) |
| GPS with EGNOS correction | 100 to 300 cm |
| GPS with "Differential correction" (DGPS) | 10 to 30 cm |
| GPS with RTK correction | 1 to 2 cm |
A DGPS correction signal with an accuracy of 10 to 30 cm is already suitable for applying mineral fertilisers. This system, combined with a straight-row system, forms the basis of precision fertilisation. The driver does the steering but is helped to follow the right track by a steering aid. In this case, you can choose between a cheaper steering aid with lights only or a screen with a direction indicator.
The next step in precision fertilisation is speed-dependent fertiliser spreading. The highest level of precision fertilisation involves the variable application of mineral fertilisers using sensors and task maps.
Task maps
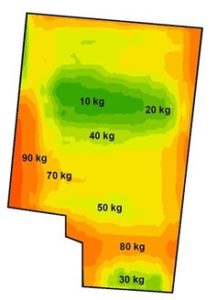
A single plot can have many differences in, for example, water balance, acidity and soil fertility. A good picture of soil and crop conditions can be obtained by using multiple data from soil sensors, crop sensors and yield measurements. Linking all this data to task maps allows for even more specific fertilisation. Figure 32 contains an example of a task map. When only using a crop sensor, you should bear in mind that an unhealthy plant may not necessarily be nitrogen-deficient. In fact, there could be multiple causes. So you should always take soil samples first.
The following steps must be taken when creating a task map:
- Survey the plot;
- Input information (obtained from sensors);
- Assign value to data;
- Create the map;
- Give feedback on data.
The use of task maps is currently in its infancy, but will have an important role in future. Many studies will be needed to translate data into appropriate actions and, in addition, better and more accessible sensors are needed to create good task maps.
Crop sensors
A plot is often considered uniform. As a result, fertilisation is based on average crop requirements. Crop sensors can be used during fertiliser spreading so that variation within a plot can be measured and fertiliser application adjusted accordingly. In this case, only the measurements obtained from crop reflectance are used. This crop reflectance is followed by a calculated vegetation index that provides information on a plant’s vitality.
There are two types of crop sensing, namely:
- Remote sensing: observing from a long distance using satellites or an aircraft;
- Proximity sensing: observing from a short distance with, for example, sensors mounted on the tractor or implement.
When remote sensing uses satellites, data cannot be retrieved in cloudy weather, but it is possible with an aircraft flying under cloud cover.
Information can be gathered based on the images acquired by remote sensing. This information can be used to create a task map of a plot.
Proximity sensing uses passive or active sensors capable of measuring and calculating crop health. This allows an instant response to crop requirements during fertilisation. An active sensor has the advantage of being able to measure even in the dark. This is not possible with a passive sensor, as it does not have its own light source. In new fertiliser spreaders, it is now possible to apply fertiliser variably based on the sensor values obtained. Proximity sensing can also be used to only create spreading maps that can be read in afterwards by the fertiliser spreader’s computer. The fertiliser spreader’s terminal connects to the tractor’s GPS system to determine its position in this process.
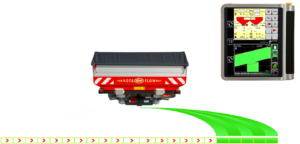
Section spreading
Besides variable spreading, modern fertiliser spreaders are already able to switch off sections for different working widths. This technique prevents overlap and keeps you within plot boundaries. The limitation here is that the sections are at least two metres wide, so overlap at a wedge-shaped area can never be completely avoided.
Source:
Groenkennisnet, 2012.
Kennisakker.
Krebbers, 2008.
Kverneland Group, 2014.
Sonsbeek, 2012.